
 Following part 1 48 and part 2 24, we now have a quadcopter capable of precise indoor localization and navigation using position data provided the Intel Realsense T265. In this last part of the ROS-based portion of my ongoing series of labs 11, we will take a look at how to use Mission Planner or python program to send waypoints to ArduPilot, perform autonomous flights, and verify the tracking performance of the T265 under some challenging scenarios.
Following part 1 48 and part 2 24, we now have a quadcopter capable of precise indoor localization and navigation using position data provided the Intel Realsense T265. In this last part of the ROS-based portion of my ongoing series of labs 11, we will take a look at how to use Mission Planner or python program to send waypoints to ArduPilot, perform autonomous flights, and verify the tracking performance of the T265 under some challenging scenarios.
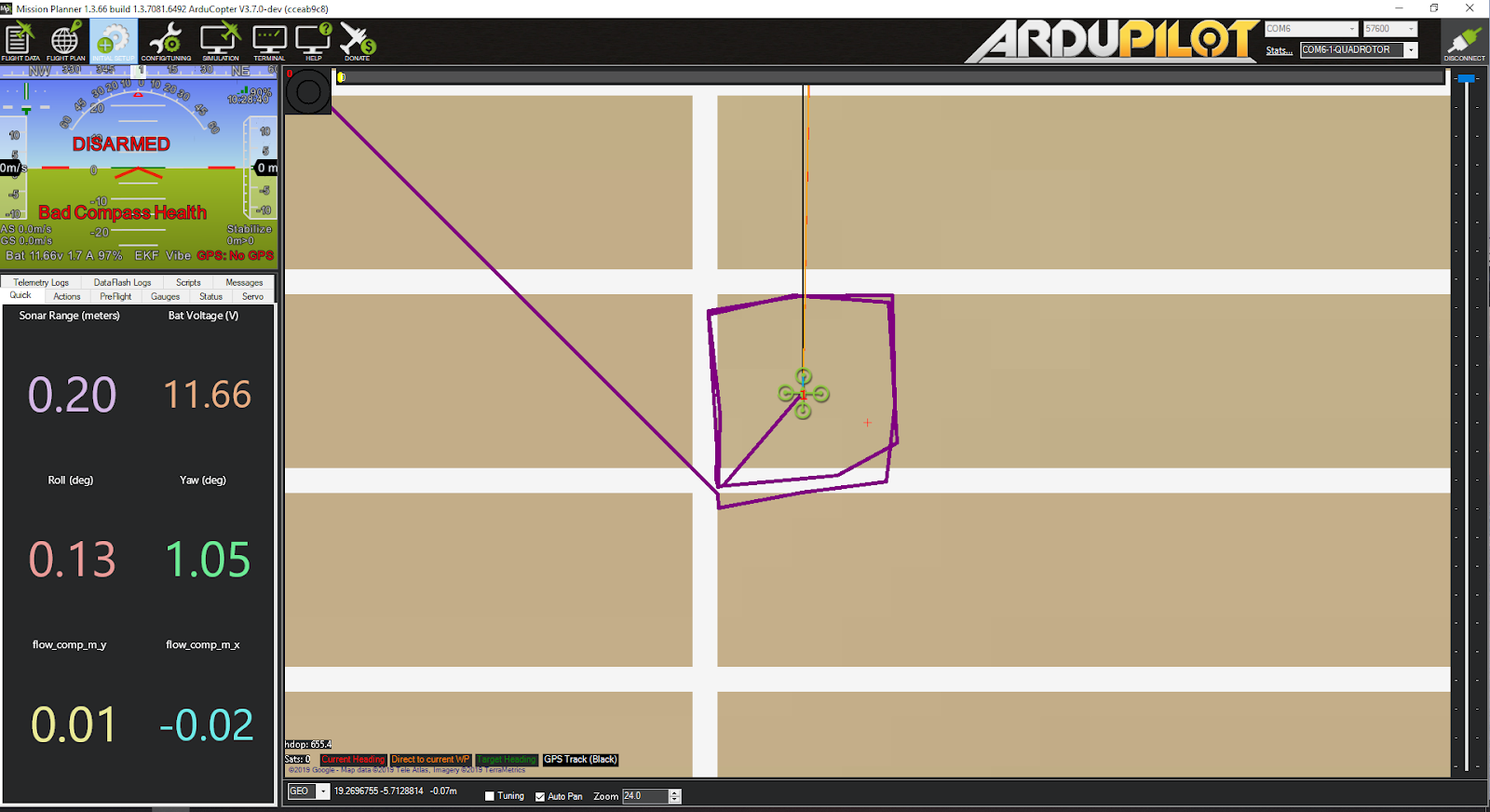
Source: Integration of ArduPilot and VIO tracking camera (Part 3) – Indoor autonomous flights and performance tests – Blog – ArduPilot Discourse
Related